1 января, 2006
Новый этап в развитии радиолокации
Назрел переход к многопозиционным станциям и системам

Перспективным направлением повышения помехозащищенности и живучести РЛС является переход от отдельных РЛС с одной передающей и одной приемной позициями (обычно совмещенными) к многопозиционным радиолокационным станциям и системам (МП РЛС), состоящим из разнесенных в пространстве передающих и приемных позиций (или однопозиционных РЛС), совместно ведущих радиолокационное наблюдение цели.
Основная идея многопозиционной радиолокации состоит в том, чтобы более эффективно (чем в обычных однопозиционных РЛС) использовать информацию, заключенную в пространственных характеристиках электромагнитного поля. Как известно, при облучении цели поле рассеяния создается во всем пространстве.
Однопозиционная РЛС извлекает информацию только из одного малого участка поля, соответствующего апертуре приемной антенны. В МП РЛС информация извлекается из нескольких разнесенных в пространстве участков поля рассеяния цели (или поля излучения источников сигналов), что позволяет существенно повысить информативность, помехозащищенность и ряд других важных характеристик.
ПРЕИМУЩЕСТВА МП РЛС
Возможность создания зоны действия требуемой конфигурации с учетом ожидаемой радиолокационной обстановки. По сравнению с однопозиционной РЛС дополнительными параметрами, определяющими зону действия МП РЛС, является геометрия системы позиции и алгоритм совместной обработки информации. Это позволяет, в частности, расширить зону действия в заданных направлениях. В МП РЛС с подвижными элементами имеется возможность гибкой целенаправленной деформации зоны действия.
Очевидно, что добавление к однопозиционной РЛС любого числа передающих и (или) приемных позиций повышает общую энергетику системы. В МП РЛС появляются и дополнительные энергетические преимущества. Прежде всего, существенный энергетический выигрыш дает кооперативный прием сигналов, при котором энергия излучения каждой передающей позиции используется всеми приемными позициями.
При достаточном разнесении позиций флуктуации эхо-сигналов в разных приемных позициях (или эхо-сигналов, создаваемых в результате облучения цели разными передающими позициями) статистически независимы. Сглаживание флюктуаций при объединении информации может дать дополнительный энергетический выигрыш, особенно если требуется обнаружить цели с высокой вероятностью. Этот выигрыш возможен и в МП РЛС с автономным приемом и даже при объединении РЛС, работающих на разных частотах.
При большом разнесении позиций, когда угол между направлениями от цели на передающую и приемную позицию приближается к 180°, может значительно возрасти эффективная площадь рассеяния (ЭПР) цели, т.е. интенсивность сигнала на входе приемной позиции.
Существует и ряд технических причин, обеспечивающих энергетические преимущества. Например, разделение передающих и приемных позиций снижает потери СВЧ – энергии в результате исключения антенных переключателей, устройств защиты приемников и др.
В МП РЛС возрастает точность измерения пространственного положения цели. В однопозиционной РЛС точность определения положения цели в картинной плоскости по измерениям угловых координат обычно значительно ниже точности измерения по дальности, особенно для удаленных целей. В МП РЛС появляется возможность определения трех координат цели путем измерения дальности относительно нескольких разнесенных РЛС или суммарной дальности (передающая позиция – цель – приемная позиция) относительно нескольких разнесенных позиций.

Возможность измерения вектора скорости и ускорения цели доплеровским методом. Измерение доплеровских смещений частоты сигналов в нескольких разнесенных позициях позволяет найти вектор скорости цели.
Измеряя скорости изменения доплеровских смещений частоты или дифференцируя составляющие вектора скорости, можно получить вектор ускорения цели. Использование доплеровских оценок скорости и ускорения повышает точность построения траектории и качество сопровождения цели, особенно на участках, где происходят резкие изменения скорости (маневр самолета или торможение баллистической цели при входе в атмосферу). При определенных условиях МП РЛС может сопровождать цели по результатам измерения только доплеровских смещений частоты, а также производных дальности по времени более высоких порядков.
Появляется возможность измерения трех координат и вектора скорости источников излучения. В отличие от однопозиционной и бистатической РЛС, которые в пассивном режиме определяют только направления прихода сигналов, т.е. пеленги источников излучения, в МП РЛС можно получать три пространственные координаты, а также их производные. Для этого используется либо триангуляционный, либо гиперболический метод, либо их сочетание.
Измерение доплеровского сдвига частоты взаимно корреляционной функции сигналов, принятых парой разнесенных позиций от движущегося источника, позволяет определить разность радиальных скоростей источника относительно этих позиций. В МП РЛС с четырьмя и более приемными позициями можно получить вектор скорости источника доплеровским методом. При триангуляции оценка скорости источника сигналов возможна только путем дифференцирования оценок координат.
Возможность измерения трех координат и вектора скорости источника излучения в МП РЛС имеет важное значение для построения их траекторий. Это относится и к источникам активных помех, когда на фоне создаваемых ими помех не удается сопровождать прикрываемые цели (в том числе и при самоприкрытии). Пассивный режим МП РЛС может применяться также и для разведки местоположения РЛС противовоздушной обороны противника.
Существенно повышается разрешающая способность станции. Полной характеристикой разрешающей способности РЛС и МП РЛС являются вероятностные и точностные характеристики обнаружения и измерения параметров цели в присутствии «мешающих» объектов или других источников помех. Для инженерных расчетов широко применяется упрощенный («детерминистский») подход, основанный на релеевском критерии разрешения.
В качестве меры разрешающей способности по любому радиолокационному параметру (дальности, угловым координатам, скорости) принимают протяженность (по этому параметру) отклика на сигнал от точечной цели. Имеется в виду, что две точечные цели можно разрешить, т.е. раздельно обнаружить, измерить параметры, если расстояние между ними по какому либо параметру больше протяженности отклика на сигнал от каждой цели.
Предполагается, что сигналы примерно одинаковы по интенсивности. Протяженность отклика по выбранному уровню (например, – 3 дБ от максимума) называется элементом разрешения по соответствующему параметру. Применение релеевского критерия позволяет наглядно оценить преимущество МП РЛС по разрешающей способности.
В МП РЛС существенно возрастает пропускная способность. Под пропускной способностью обычно понимается максимальное число целей, которое РЛС может обслужить в течение определенного интервала времени. В РЛС с постоянным циклом обзора пропускная способность ограничивается только возможностями обрабатывающей аппаратуры РЛС.
В последние годы получили широкое распространение РЛС с электронным сканирование, в которых более рационально используются энергетические и информационные ресурсы РЛС. Возможность быстрого (за единицы микросекунд) переброса диаграммы направленности антенн в любое направление (в пределах сектора электронного сканирования) позволяет эффективно сочетать обзор и поиск целей с сопровождением обнаруженных целей.
Интервалы между зондированиями сопровождаемых целей, а также энергия в каждом зондировании выбираются адаптивно в результате анализа поступающей информации. Ограничения по числу одновременно сопровождаемых целей определяются не только производительностью аппаратуры, но и энергетическими и точностными характеристиками.
В МП РЛС возрастает объем «сигнальной» информации. Под «сигнальной» информацией (в отличие от координатной) обычно понимают содержащуюся в эхосигналах информацию о геометрических, физических и других характеристиках цели, а также характеристиках ее движения вокруг собственного центра масс. Благодаря одновременному наблюдению целей с различных направлений объем сигнальной информации в МП РЛС существенно возрастает по сравнению с однопозиционной РЛС.
Измеряя амплитуду, фазу и поляризацию принятых разнесенными позициями сигналов, можно определять размеры, форму и характеристики собственного вращения цели точнее и за меньшее время. В пространственно-когерентных МП РЛС с достаточно большими размерами апертуры антенной системы можно получать двумерное и даже трехмерное радиоизображение цели. При отсутствии длительной пространственной когерентности можно получить несколько дальностных портретов целей под разными ракурсами, а также дву- и трехмерные радиоизображения путем измерения разностей фаз эхосигналов от разрешенных по доплеровским частотам блестящих точек цели.
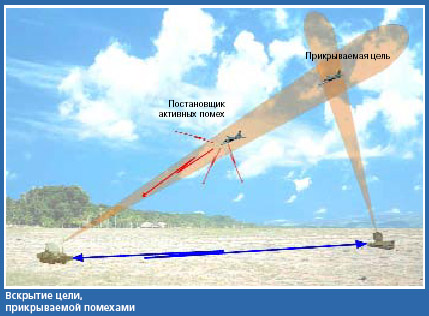
Повышается защищенность от активных помех. В МП РЛС можно применять все способы защиты от активных помех однопозиционных РЛС, но есть и дополнительные возможности. Однопозиционные РЛС способны подавлять помехи, действующие по боковым лепесткам ДН антенн, но при воздействии помех по главным лепесткам ДН обычно не могут обнаружить цели. В то же время создать такие помехи однопозиционной РЛС нетрудно, так как направление на РЛС определяется по ее излучению. Это позволяет создавать «прицельные по направлению» помехи. Плотность мощности можно еще увеличить, применив «прицельные по частоте» помехи в полосе частот зондирующего сигнала РЛС.
Значительно труднее создать прицельные по направлению помехи бистатической РЛС, так как направление от источника активных помех на неизлучающую приемную позицию часто неизвестно. Однако и бистатические РЛС обычно не могут обнаружить цели при воздействии помех по главному лепестку ДН приемной антенны.
Создать прицельные по направлению помехи одновременно нескольким позициям МП РЛС весьма сложно. Вынужденное излучение в широком секторе снижает плотность мощности помех, действующих на каждую позицию.
Против МП РЛС с несколькими передающими позициями, работающими на разных частотах, и кооперативным приемом сигналов в широком диапазоне частот неэффективны и прицельные по частоте помехи. Вынужденное «размазывание» мощности по спектру приводит к дополнительному снижению плотности мощности помех в полосе частот зондирующих сигналов.
Важная особенность МП РЛС состоит в том, что при оптимальной совместной обработке сумм сигналов и помех, принимаемых разнесенными позициями, подавляются помехи, взаимно коррелированные в разных позициях, и выделяется полезный сигнал. Это позволяет в принципе обнаруживать цели, прикрываемые помехами по главным лепесткам ДН принимаемых антенн.
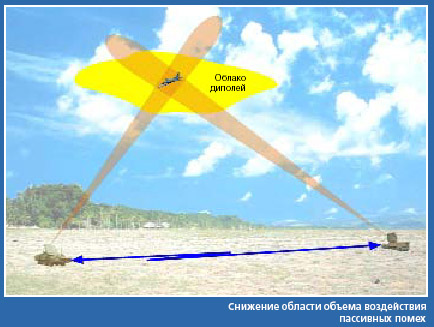
Возрастает защищенность от пассивных помех. Благодаря пространственному разнесению позиций объем области пересечения главных лепестков ДН передающей и приемной позиций МП РЛС может быть намного меньше, чем объем области главного лепестка приемопередающей ДН однопозиционной РЛС. При определенных условиях это приводит к существенному снижению интенсивности пассивных помех на входах приемников. Против МП РЛС с разнесенными передающими и приемными позициями малоэффективны источники мощных направленных пассивных помех, например, уголковые отражатели.
Рассредоточенность в пространстве и избыточное число позиций значительно повышает живучесть МП РЛС по сравнению с однопозиционной РЛС и даже несколькими РЛС, не объединенными в МП РЛС. В отличие от однопозиционной и бистатической РЛС выход из строя одной или даже нескольких позиций МП РЛС не приводит к полному нарушению работоспособности, а вызывает лишь определенное ухудшение характеристик.
Выход из строя может происходить как в результате внешнего воздействия, так и из-за технических отказов аппаратуры, так что повышается не только живучесть, но и надежность МП РЛС. Этому способствует возможность изменения конфигурации МП РЛС при выходе из строя отдельных позиций.
ПРИМЕРЫ
Однако в природе ничего даром не дается. За все вышеперечисленные преимущества необходимо расплачиваться. Но к проблемным вопросам МП РЛС мы намерены обратиться в следующих публикациях на страницах «ВКО».
Что есть сегодня, на современном этапе развития радиолокационной техники не только в теории, но и на практике? В качестве примера можно привести многопозиционную пассивную систему радиотехнической разведки «Вега» на базе станции радиотехнической разведки «Орион». По совокупности основных тактико-технических характеристик она не уступает, а по точностным и обзорным характеристикам, а также мобильности превосходит лучшие зарубежные образцы пассивных разведывательных комплексов («Тимпэк» (США), на вооружении с 1991 г., «Хеллас» (Германия), на вооружении с 1993 г.).
Проведенные исследования показали, что введение в состав информационных систем ПВО средств РТР типа «Вега» позволяет существенно повысить их устойчивость, живучесть и эффективность, особенно в экстремальных условиях боя, за счет:
– использования средствами РТР для обнаружения и определения координат целей как помеховых, так и любых других их бортовых радиоизлучений, без которых нормальное функционирование СВН либо невозможно (БРЭС навигации, высотомеры, системы огибания поверхности земли на малых высотах, системы опознавания государственной принадлежности), либо исключается их боевое предназначение (БРЛС разведки, системы радиопередачи информации, радиотелеуправления);
– высокой скрытности функционирования средств РТР, обеспечивающим их неуязвимость от противорадиолокационных ракет типа "Харм";
– высокой точности координатных измерений и устойчивости функционирования систем РТР.
Такие средства пассивной локации предназначены для обнаружения, распознавания и трассового сопровождения воздушных целей по излучениям их бортовых РЭС в интересах повышения качества и полноты информационного обеспечения боевых действий соединений, частей и подразделений ПВО в сложной помеховой обстановке, а также решения задачи выделения из состава удара и приоритетного обстрела наиболее важных воздушных целей.
Многопозиционная радиолокация позволит существенно повысить эффективность радиолокационных средств воздушно-космической обороны уже в ближайшем будущем.
начальник факультета Военной академии
воздушно-космической обороны,
кандидат военных наук, доцент, полковник
старший преподаватель кафедры тактики и вооружения ЗРВ
Военной академии воздушно-космической обороны,
кандидат технических наук, доцент, подполковник
Опубликовано 1 января в выпуске № 4 от 2006 года
- Комментарии
- Vkontakte
- Читаемое
- Обсуждаемое
- Past:
- 3 дня
- Неделя
- Месяц
В чем вы видите основную проблему ВКО РФ?









