9 февраля, 2014
Как повысить эффективность ПВО, СККП, СПРН и ПРО
Необходимость развития космического эшелона информационных средств ВКО диктуется новыми угрозами в космосе и из космоса, а также естественным стремлением сохранения паритета в эффективности космических информационных средств на фоне значительных достижений других стран. В последние 10-15 лет многие государства пошли по пути миниатюризации космической информационной техники, реализации новых идей в области создания высокочувствительных бортовых средств наблюдения космических объектов, а также создания на их основе многоспутниковых систем наблюдения с обработкой информации в реальном времени (см. статью автора «ВКО», № 6, 2013 г.).
 |
| Фото: NASA |
Материал данной статьи посвящен развитию отечественного космического эшелона информационных средств ВКО за счет введения в его состав дополнительных элементов, существенно повышающих эффективность средств ПВО, СККП, СПРН и ПРО. Он основан на результатах инициативных исследований, проведенных в последние годы коллективом молодых ученых под руководством автора.
При подготовке материала статьи автор ни в коем случае не ставил под сомнение достоинства и высокую эффективность существующих космических средств информационного обеспечения ВКО. Речь идет об эффективных дополнениях, создаваемых с использованием новых космических информационных технологий.
Наземно-космическая система обнаружения и сопровождения низковысотных летательных аппаратов
В настоящее время средства защиты от низковысотных крылатых ракет представляют собой в основном объектовые наземные системы ПВО с очень малым радиусом действия (единицы-десятки километров). Это объясняется тем, что эти авиационные средства нападения могут двигаться на высоте единицы-десятки метров и обладают возможностью огибания рельефа. Вместе с тем дальность полета крылатых ракет может достигать 1–2 тыс. км, а их запасы в зарубежных арсеналах исчисляются десятками тысяч. По этим причинам задача создания сети дальнего обнаружения крылатых ракет на боевых курсах (сотни-тысячи километров) является важной и своевременной для оборонного комплекса России.
 |
| Фото: NASA |
В основе принципа работы предлагаемой системы лежит принцип бистатической радиолокации. Он основан на использовании радиоподсвета из космоса определенной территории земной поверхности известным радиосигналом с геостационарного спутника и приема отраженных от ЛА-цели сигналов с помощью распределенной сети наземных приемников. Каждым приемником сети принимается прямой сигнал спутника и сигнал, отраженный от цели, и измеряется их взаимное запаздывание и разность допплеровских сдвигов частот. Далее производится определение координат и скорости цели относительно сети разнесенных приемников.
Система состоит из космического (воздушного) и наземного сегментов (рис. 1). Космический сегмент включает космический аппарат КА (летно-подъемное средство) (1, 1’); бортовой локатор радиоподсвета (2, 2’); систему связи (3, 3’). Наземный сегмент включает сеть станций приема и обработки прямых и отраженных от цели сигналов радиоподсвета (4); систему передачи данных на базе узловых станций существующих сетей мобильной связи (5); региональные пункты обработки результатов обнаружения и измерения параметров целей (6); пункт управления передатчиком (7, 7’); командный пункт (КП) системы (8).
Рис. 1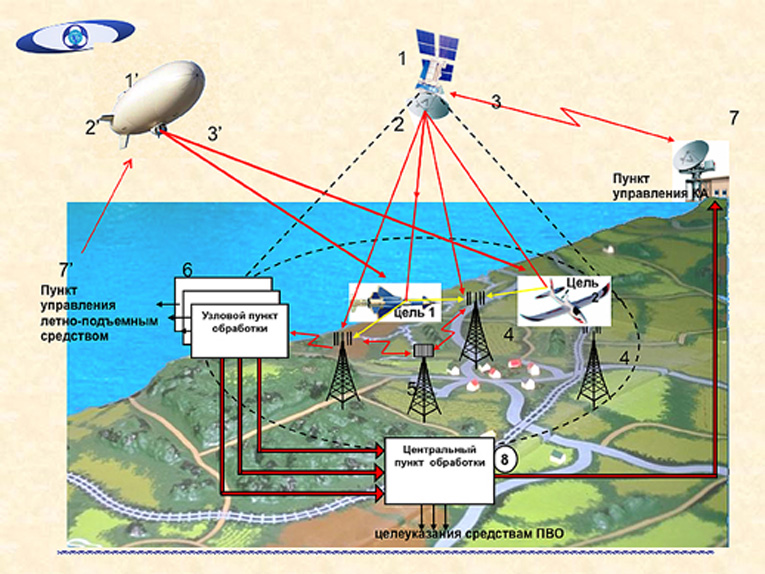
Радиоподсвет организуется в следующих режимах (рис. 2): подсвет определенной территории (режим «пятно»), подсвет границ замкнутой территории (режим «круговой барьер»), подсвет границы открытой территории (режим «линейный барьер»), подсвет с летно-подъемных средств в режиме «аэробарьер». Переключение режимов осуществляется по команде с командного пункта системы (8) в соответствии с решаемыми задачами.
| Рис. 2 |
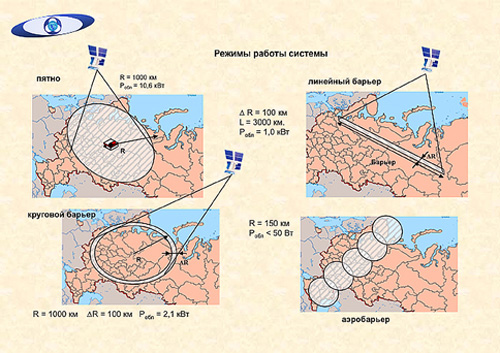 |
На рисунках приведены геометрические размеры облучаемых областей и необходимая мощность бортового передатчика, рассчитанная при ЭПР цели 1 кв. м, эффективной площади наземной антенны бистатического локатора 1 кв. м и пороговом отношении сигнал-шум, равном 20. Требуемые мощности бортовых передатчиков вполне реализуемы на современных КА на основе солнечных энергетических установок.
Бортовой локатор радиоподсвета (2 или 2’) управляется с командного пункта системы (8) через пункт управления космическим аппаратом КА (летно-подъемным средством) (7 или 7’) и систему связи (3 или 3’). Для повышения скрытности и помехозащищенности станция управления может изменять параметры сигнала подсвета (несущая частота, тип модуляции и др.) и при переходе из режима обнаружения в режим сопровождения цели.
Наземная сеть приемников (4) осуществляет прием, измерение взаимного запаздывания и обработку прямых и отраженных сигналов от целей. Приемники могут быть расположены на существующих вышках систем сотовой связи, на специальных вышках или на возвышениях рельефа местности. Сигналы, отраженные от цели, одновременно фиксируются несколькими ближайшими приемниками. Полученная информация передается по радиоканалам GSM сетей узловых станций (5) на наземные пункты обработки (6).
Пункты обработки радиолокационной информации (6) (один пункт на 20–50 приемников) выполняют оценку параметров движения целей, слежение, определение наиболее вероятных маршрутов движения целей, выдают целеуказания средствам ПВО и запросы на изменение параметров излучения. Выдача информации об обнаружении низколетящей цели выполняется в реальном времени с минимальной задержкой по сети мобильной связи (5).
Пункт управления КА из состава НАКУ (7) или пункт управления летно-подъемным средством (7’) контролирует работу носителя через систему связи (3) и при необходимости выдает команды на изменение режимов работы радиолокатора подсвета (2 или 2’) и бортовой аппаратуры (1 или 1’).
Командный пункт системы (8) обеспечивает выдачу результатов обнаружения целей на средства ПВО и управление элементами системы.
Предлагаемая система существенно повышает эффективность наземных средств ПВО и обладает следующими преимуществами:
1. Возможностью обнаружения низковысотных воздушных целей (крылатых ракет, беспилотных и пилотируемых аппаратов) на большой территории и на большом отдалении от центральных районов страны при невысоких затратах на создание наземного сегмента.
2. Возможностью размещения приемных устройств на существующих и перспективных сетях вышек сотовой связи, использования их систем энергообеспечения, а также каналов передачи информации, что существенно упрощает развертывание наземной части.
3. Высокой живучестью в силу избыточности системы наземных приемников.
4. Скрытностью функционирования наземного сегмента системы в силу отсутствия собственного радиолокационного сигнала, что существенно усложняет задачу выведения системы из строя.
5. Возможностью обнаружения воздушных объектов, замаскированных с использованием «стелс-технологий» (происходит из свойства бистатической РЛС).
6. Возможностью повышения характеристик обнаружения за счет избыточности сети приемных станций.
7. Малыми габаритами, весами, энергопотреблением и стоимостью приемно-обрабатывающей аппаратуры наземного сегмента.
Система имеет двойное применение, поскольку излучаемый сигнал может использоваться для решения дополнительных задач:
- создания сети непосредственного космического радио- и телевизионного вещания в районах Крайнего Севера и удаленных регионах страны;
- создания космических интернет-каналов для обслуживания удаленных районов;
- передачи дифференциальных поправок для потребителей космических навигационных систем ГЛОНАСС, GPS, GALILEO и пр.
Возможность применения космического радиоподсвета для целей радиолокации исследована в ОАО «МАК «ВЫМПЕЛ» при создании радиолокатора воздушного базирования с синтезированной апертурой для получения радио-изображений участков подстилающей поверхности в радиоподсвете со спутников ГЛОНАСС. Антенна бистатического радиолокатора бокового обзора располагалась на борту летающей лаборатории, созданной на базе самолета Ан-2. Разрешение на местности проверялось по системе наземных отражателей, разнесенных на калиброванные расстояния. В качестве наблюдаемого участка местности использовался отрезок русла реки с береговыми постройками, по середине русла двигались две баржи, у дальнего берега были причалены две баржи. В бистатическом режиме получены радио-изображения всех перечисленных объектов. При этом следует отметить весьма незначительную мощность, излучаемую с борта спутника (около 70 Вт). По семи видимым спутникам были получены семь разноракурсных радиоизображений. Площадь приемной антенны – 0,25 кв. м, расстояние до цели – до 1 км. Эти исследования подтверждают весьма значительные возможности бистатической космической радиолокации.
Космическая радиоэлектронная система дальней оперативной радиотехнической разведки и целеуказания
На основе созвездий (кластеров) малых космических аппаратов (МКА), размещенных на эллиптических орбитах, разнесенных по долготе восходящего узла, может быть создана система дальнего обнаружения наземных, надводных и воздушных носителей средств воздушного нападения в Северном полушарии по их бортовым источникам радиоизлучения. Система построена на принципах системы радиотехнической разведки, когда приемники радиоизлучения располагаются в околоземном космосе (рис. 3). На борту каждого спутника размещается ретранслятор сигналов цели, ретранслированные сигналы принимаются на наземной станции. Координаты каждого спутника определяются по бортовой навигационной аппаратуре ГЛОНАСС. По разности хода сигналов, принимаемых от трех-четырех КА, определяются координаты цели. При расстояниях между спутниками в кластере порядка 10–50 км точность определения координат наземных целей может достигать десятков-сотен метров.
Рис. 3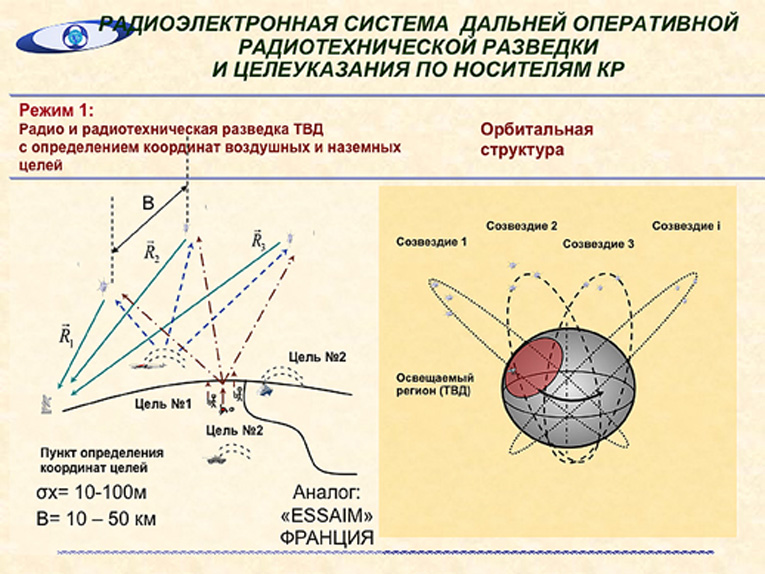
В одном из вариантов системы высота апогея и перигея орбиты спутников составляет 5 тыс. км и 700 км соответственно, период обращения – 2,4 часа, количество кластеров – 3–4. Наклонение орбиты – 64 град., мощность бортовых передатчиков – 0,5–1 Вт, размер зоны обслуживания – 3000–6000 км. Масса малого КА кластера – до 100 кг. Количество КА в системе непрерывного наблюдения Северного полушария не превышает 12 штук.
Кроме режима радиомониторинга (радиотехнической разведки) система может работать в режиме дуплексной связи на северном ТВД, в режиме дистанционного мониторинга наземных и воздушных транспортных средств, а также в режиме мониторинга территории и атмосферы на основе сети наземных и воздушных датчиков.
Преимущества системы:
1. Высокая точность определения координат целей.
2. Высокая оперативность выработки целеуказаний (реальный масштаб времени).
3. Большая зона обслуживания.
4. Многофункциональность системы.
Космический эшелон СККП
Возможность обнаружения космических целей с помощью сети МКА-наблюдателей рассматривалась для двух вариантов наблюдения: при наблюдении целей в направлении солнечного подсвета, а также в направлении соседних МКА орбитальной системы наблюдения (рис. 4). При этом наблюдатели размещены на солнечно-синхронных орбитах. Для исследования эффективности наблюдения космических объектов (КО) была разработана математическая модель, позволяющая имитировать процесс наблюдения для различных орбитальных построений системы МКА-наблюдателей, характеристик бортовой аппаратуры обнаружения, а также параметров орбиты наблюдаемого КО.
Рис. 4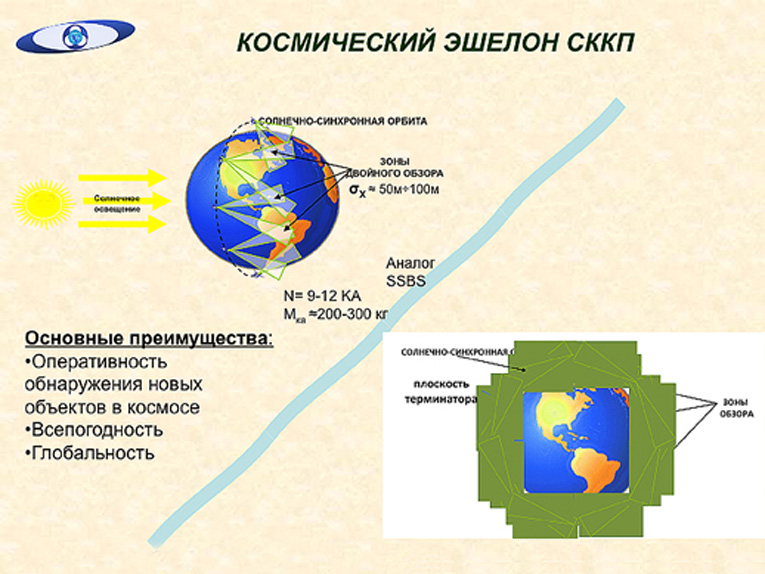
При моделировании полагалось, что аппаратура наблюдателя обладает чувствительностью 10-14 Вт/кв. м и угловым разрешением 10-4 рад. Результаты оценки оперативности уточнения параметров орбит КО (рис. 5) свидетельствуют о том, что время обновления информации о КО достаточно сильно зависит от числа МКА-наблюдателей в системе. Вместе с тем даже при 2 МКА в группировке (что может быть при отказе части аппаратов системы) оперативность достаточно высока.
Рис. 5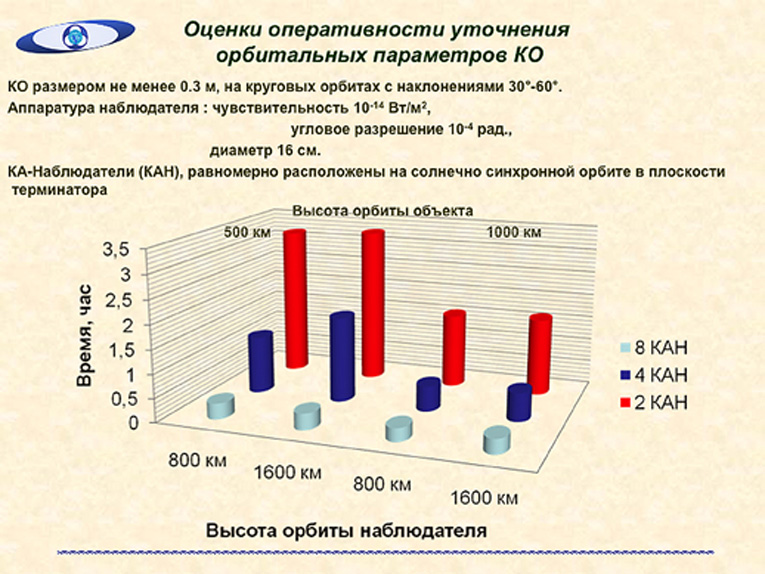
Что касается времени обнаружения новых КО размером порядка 1 м (рис. 6), то в любом случае оно остается существенно меньше суток, что практически недостижимо для наземных оптических наблюдателей.
Рис. 6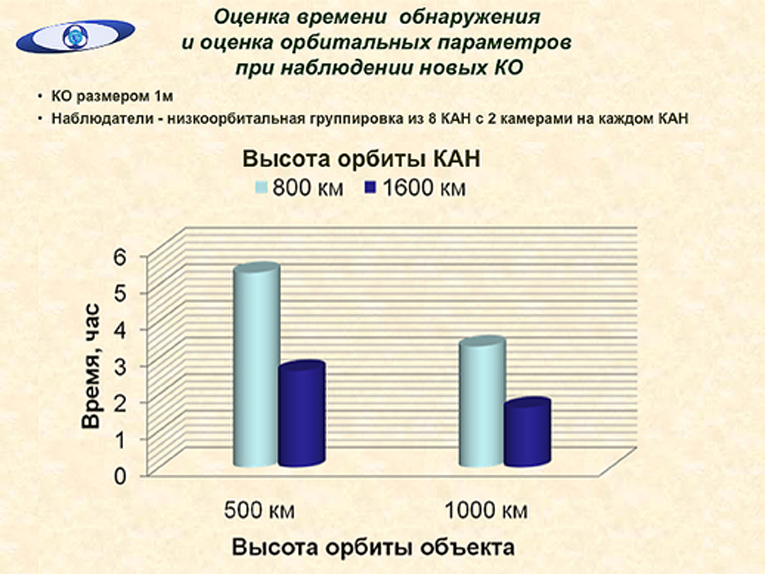
Исследования показали, что при установленных характеристиках аппаратуры наблюдения в рассмотренной системе существует принципиальная возможность наблюдения КО диаметром 3–5 см, однако это требует существенного увеличения числа МКА-наблюдателей.
На основе современных технологий конструирования вес каждого МКА-наблюдателя не превысит 200–250 кг.
В целом вынесение оптических средств наблюдения в космос дает целый ряд преимуществ перед системой наземных оптических средств:
1. Исключение мешающего действия атмосферы и связанных с ней метеорологических факторов.
2. Глобальность наблюдения.
3. Высокая оперативность при обнаружении новых и уточнении орбит известных КО, что весьма важно при контроле опасных сближений.
Помимо МКА-наблюдателей, оснащенных оптико-электронной аппаратурой, в состав орбитальной группировки СККП должны входить МКА радиотехнической разведки стратегической космической зоны (СКЗ) до геостационарной орбиты включительно (рис. 7). Два низкоорбитальных МКА такой системы в течение суток способны обеспечить сканирование всей СКЗ, что значительно превышает возможности наземных радиотехнических средств.
Рис. 7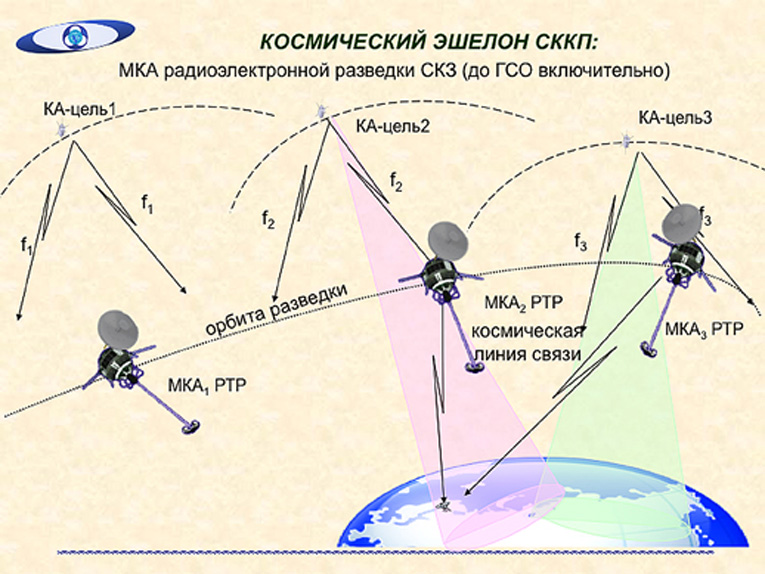
Другой важнейшей составляющей космического эшелона СККП является группировка МКА-инспекторов, которые уже создаются в ряде стран (США, Китай и др.). И если необходимость их создания на низких орбитах может быть подвержена сомнению (функцию получения детальных портретов могут выполнить специализированные наземные радиолокаторы), то для геостационарных орбит создание инспекторов крайне актуально. Это объясняется достаточно плотной «населенностью» этой орбиты и ограниченными возможностями наземных оптических наблюдательных средств: и отечественная научная сеть оптических наблюдений, и американская сеть на основе станций GEODSS с проницающей способностью 18m не могут наблюдать на этой орбите КО размерами менее 30 см.
Это обстоятельство открывает возможность создания «невидимых» космических инспекторов на достаточно развитых технологиях наноспутников (до 10 кг) и пикоспутников (до 1 кг), в частности технологиях Cube-sat с размерами спутника 10х10х10 см. Для наблюдения таких объектов потребуется увеличение проницающей способности наземных телескопов до 20m, что в ближайшее время выглядит весьма проблематичным. Поэтому для геостационарной орбиты появляется реальная возможность создания практически невидимых с Земли космических инспекторов.
Группировка МКА для наблюдения аэродинамических объектов
Проблема наблюдения аэродинамических объектов (АДО) – самолетов и гиперзвуковых летательных аппаратов (ГЗЛА) – из космоса является актуальной и сложной многосторонней проблемой. При этом низкоорбитальные средства наблюдения по сравнению с высокоорбитальными имеют преимущества по силе сигналов и разрешающей способности, что объясняется малым расстоянием между наблюдателем и объектом наблюдения. Минимизация затрат на создание и эксплуатацию такой сети достигается на основе использования МКА, оснащенных малогабаритными оптико-электронными приборами ИК-диапазона.
Критическим исходным требованием для определения орбитальной структуры и состава сети МКА является необходимая оперативность наблюдения АДО, которая накладывает ограничение сверху на максимальный перерыв между наблюдениями любой точки земной поверхности в пределах дальности полета АДО. Ориентировочную оценку длительности перерыва между наблюдениями можно получить на основе данных о кинематике полета АДО. Например, для ГЗЛА данные следующие: время полета – до 60 мин., высота – 15–90 км, скорость – 5–20 М (1,5–6 тыс. км/час). Исходя из этого, время 30–50 мин. можно рассматривать как ориентировочное требование к периодичности наблюдений группировкой МКА.
Количественные оценки основных параметров группировки МКА и бортовой аппаратуры наблюдения, а также эффективности решения целевой задачи получены путем моделирования на специализированном программно-алгоритмическом комплексе (ПАК) для проектирования и системного анализа сетей МКА различного назначения. ПАК позволяет моделировать и определять эффективность сетей МКА, оснащенных оптико-электронной аппаратурой наблюдения. При этом учитываются характеристики бортовой аппаратуры, спектроэнергетические характеристики наблюдаемых объектов, прозрачность атмосферы, фоновые излучения земной поверхности, облаков и ряд других факторов. Для решения этой задачи была разработана модель фона.
В основу работы бортовой ИК-аппаратуры наблюдения положен принцип сканирования земной поверхности за счет орбитального движения и поперечного качания поля зрения прибора с шириной обзора 110 град. При малом периоде качания возможно двух-трехкратное сканирование одного участка поверхности при одном пролете МКА над контролируемой территорией.
В результате моделирования установлено, что для обнаружения и надежного сопровождения АДО при максимальном периоде наблюдения 30 мин. необходима группировка из 9 МКА, равномерно размещенных на трех орбитах высотой 1500 км и наклонением 60 град. Оптико-электронный прибор имеет следующие основные характеристики: диаметр входного зрачка – 18 см, пространственное разрешение на местности – не более 100 м, поле обзора – 110 град., пороговая чувствительность – 4х10-12 Вт/кв. м в полосе ИК-илучения 3,5–5,5 мкм.
Рассмотренная система МКА имеет двойное применение, поскольку она может использоваться для обнаружения очагов пожаров по всей территории планеты.
Группировка МКА юстировки и калибровки РЛС ВКО
Спутники с эталонными параметрами орбит и эталонными отражательными характеристиками являются эффективным инструментом определения точности траекторных измерений (режим «юстировка») и определения энергетического потенциала (режим «калибровка») радиолокаторов СПРН, СККП и ПРО. В современных условиях для юстировки целесообразно иметь МКА, оснащенные навигационной аппаратурой потребителей системы ГЛОНАСС или бортовые ответчики, кооперируемые с испытываемой РЛС (рис. 8). Такие МКА должны располагаться на высотах, соответствующих дальности действия РЛС.
| Рис. 8 |
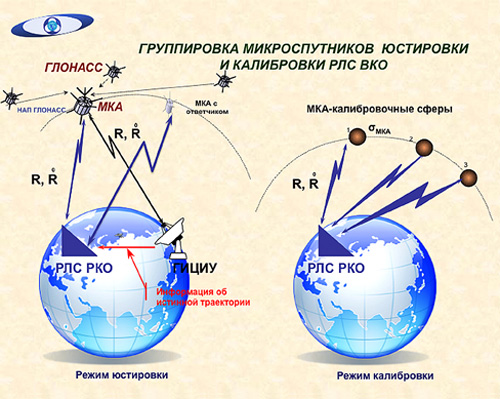 |
Эффективная площадь рассеяния эталонных малых спутников сферической формы сильно зависит от диаметра сферы. Для РЛС дециметрового диапазона с длиной волны 0,7 м оптимальные диаметры составляют 0,53, 0,77, 1,3 м и т. д. Для РЛС метрового диапазона с длиной волны 1,9 м оптимальные размеры МКА калибровки равны примерно 0,7, 1,4, 2,2 м и т. д. С увеличением диаметра МКА эффективность калибровки растет. Поэтому наилучшим решением, пригодным для калибровки РЛС всех диапазонов (в том числе и РЛС сантиметрового диапазона), является воссоздание группировки МКА типа «ЮГ» диаметром 2 м и весом 750 кг (входил в комплекс «Тайфун»). Еще одно возможное современное решение – создание группировки раскрываемых на орбите сетчатых сферических МКА с приведенными размерами.
Другим направлением применения калибровочных МКА является калибровка математической модели определения и прогнозирования движения космических объектов в верхних слоях атмосферы. Эта модель определяет точность прогноза движения элементов космического мусора в задачах предупреждения об опасных сближениях с КА, в том числе с МКС, а также точность прогноза траектории спуска и точки падения несгоревших в атмосфере ракетных блоков и отработавших КА.
С этой целью автором был инициирован космический эксперимент по запуску калибровочного МКА, имеющего форму сферы диаметром 53 см. Кроме ОАО «МАК «Вымпел» в кооперацию участников эксперимента входили РКК «Энергия», ОАО «НПК «НИИДАР», НИИ ЦПК им. Ю. А. Гагарина, ЦУП ЦНИИмаш, ИПМ им. М. В. Келдыша. Наблюдения велись всеми РЛС СПРН, а также специализированной РЛС СККП. Полет МКА продолжался с августа по ноябрь 2012 г. и дал необходимую информацию для уточнения модели плотности верхней атмосферы.
Группировка МКА оперативного мониторинга состояния ионосферы
Прием навигационных сигналов системы ГЛОНАСС на борту МКА по радиолинии, проходящей через ионосферу, открывает возможность измерения полного электронного содержания вдоль линии навигационный КА – МКА (рис. 9).
Рис. 9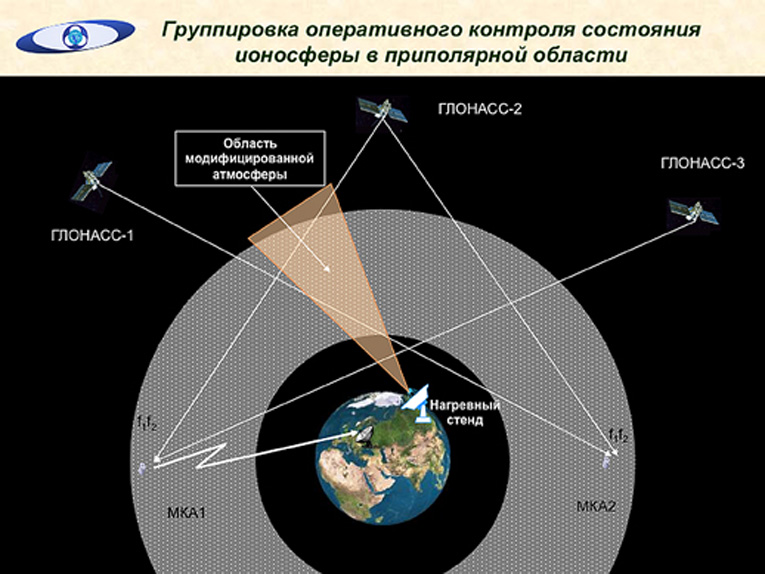
Группировка из 2–3 МКА, оснащенных двухчастотной приемной навигационной аппаратурой ГЛОНАСС, позволит решить целый ряд важнейших практических задач:
- повышение точности системы ГЛОНАСС в глобальном масштабе;
- повышение точности РЛС СПРН метрового диапазона;
- повышение точности и дальности действия загоризонтных РЛС;
- обнаружение областей ионосферы, модифицированных с помощью нагревных стендов;
- повышение точности предсказания условий КВ-связи в северных широтах.
Заключение
В связи с ограниченным объемом публикации в качестве заключения приведем перечень из 8 направлений развития космического эшелона информационных средств ВКО (рис. 10). Часть функций, решаемых несколькими МКА, может быть объединена на борту одного из них. Для каждой группировки в скобках указано ее двойное применение.
Рис. 10
Для реализации представленных направлений необходимо развитие целого ряда критических технологий, таких как:
- миниатюризация бортовой аппаратуры МКА и создание космических микроплатформ весового ряда от 1 до 10 кг;
- возможность обработки огромных потоков информации, поступающей с борта МКА, в реальном масштабе времени (МКА СККП, МКА ионосферного мониторинга);
- создание миниатюрных приборов видеонаблюдения видимого и ИК-диапазонов;
- создание перестраиваемых малогабаритных приемников для МКА РТР;
- технологии бистатической радиолокации и др.
Опубликовано 9 февраля в выпуске № 1 от 2014 года
- Комментарии
- Vkontakte
- Читаемое
- Обсуждаемое
- Past:
- 3 дня
- Неделя
- Месяц
В чем вы видите основную проблему ВКО РФ?









