26 января, 2010
Точка отсчета в истории ПРО
Впервые проблема противоракетной обороны была поднята на государственном уровне в СССР в 1953 г., когда семь маршалов Советского Союза во главе с Василием Соколовским направили в ЦК КПСС письмо, в котором говорилось: «…средства ПВО, имеющиеся у нас на вооружении и вновь разрабатываемые, не могут бороться с баллистическими ракетами. Просим поручить промышленным министерствам приступить к работам по созданию средств борьбы против баллистических ракет».
К ИСТОРИИ ВОПРОСА

Олег Васильевич ГОЛУБЕВ – один из создателей системы «А», доктор технических наук, профессор, заслуженный деятель науки Российской Федерации, лауреат Ленинской премии СССР, лауреат Государственной премии Российской Федерации
Фото: Михаил ХОДАРЕНОК
Обращение высшего военного руководства было встречено с пониманием и поддержано руководством страны. Вскоре разработка первой системы ПРО была поручена КБ-1 (ныне ОАО ГСКБ «Алмаз-Антей» имени академика А. А. Расплетина). В те годы КБ-1 являлось головной организацией по созданию систем управляемого ракетного оружия и, прежде всего, систем противосамолетной обороны. Здесь работали лучшие инженеры и ученые в области радиотехники, электроники, автоматического регулирования, теории вероятностей и случайных процессов. Ведущую роль в этой работе сыграл коллектив, возглавляемый 36-летним ученым Григорием Кисунько.
Сложности при создании первой в мире системы ПРО были более чем значительны. Известные традиционные методы радиолокации не позволяли с требуемой сверхвысокой точностью определять все три координаты цели (дальность, азимут, угол места). Радиолокатор достаточно точно мог только измерить дальность до цели. Малые размеры боеголовки МБР делали ее труднонаблюдаемой для радиолокатора на требуемых дальностях обнаружения.
Поэтому для любой гипотетической противоракетной системы требовались огромные, мощные и поэтому чрезвычайно дорогие радиолокационные станции. Наконец, весь процесс стрельбы чрезвычайно скоротечен, баланс располагаемого времени крайне мал, а потому к противоракете предъявлялись неимоверно высокие требования по скорости полета и маневренности.
Григорий Кисунько выдвинул следующие принципы конструирования и построения стрельбового комплекса противоракетной обороны.
Требуемая большая дальность действия системы ПРО по малоразмерной цели должна достигаться за счет большой мощности излучения радиолокатора, выбора оптимальной рабочей длины волны, высокой чувствительности приемных устройств и достаточно больших размеров антенных устройств. Радиолокатор ПРО действительно будет крупногабаритным и энергоемким, но государственная важность противоракетной обороны оправдывает большие экономические и ресурсные затраты.
Необходимая высокая точность определения координат баллистической цели может быть достигнута отказом от традиционного для радиолокации метода определения координат цели по двум измеренным углам и дальности. Нужно перейти к методу триангуляции цели по трем дальностям, измеренным тремя радиолокаторами, разнесенными на местности. Трудности триангуляции сверхскоростной цели в реальном масштабе времени можно преодолеть с помощью высокопроизводительных электронно-вычислительных машин, имеющих соответствующее программно-алгоритмическое обеспечение. Радиолокаторы и ЭВМ должны быть соединены между собой с помощью широкополосных линий связи.
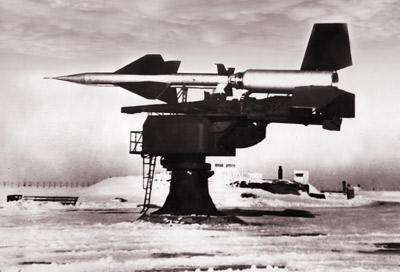
Противоракета В-1000 на пусковой обстановке СМ-71П
Фотоархив ВКО
Распознавание радиолокаторами ПРО боевых блоков БР (отделившихся от корпуса ракеты) и самих корпусов БР, продолжающих лететь как бы параллельно с боевым блоком (проблема селекции целей), предлагалось осуществлять по различию в мощности отражаемых ими радиосигналов. Поражение прочной боеголовки БР можно обеспечить, используя для этого кинетическую энергию соударения высокоскоростной цели с осколками – поражающими элементами боевой части противоракеты.
Летом 1956 г. в казахстанской пустыне Бет-Пак-Дала началось строительство противоракетного полигона.
СИСТЕМА А – СОСТАВ И НАЗНАЧЕНИЕ
Система «А» представляла собой полигонный комплекс средств противоракетной обороны, который был создан для экспериментальной отработки и проверки принципов построения средств ПРО на действующих макетах этих средств путем проведения стрельб управляемыми противоракетами по головным частям отечественных баллистических ракет типа Р-5 и Р-12.
ГОЛОВНЫЕ РАЗРАБОТЧИКИ СРЕДСТВ СИСТЕМЫ «А»
(наименования предприятий и организаций даны на момент разработки)
КБ-1 ГКРЭ (ныне ГСКБ «Алмаз-Антей» им. академика А. А. Расплетина) – по системе «А» в целом, по системе наведения противоракет, по аппаратуре радиолокаторов точного наведения, станции передачи команд, бортовой радиоаппаратуры наведения, автопилотам, контрольно-испытательной аппаратуре для проверки бортовой радиоаппаратуры и автопилотов, а также по экспериментальным установкам для исследования радиолокационных свойств баллистических ракет.
ОКБ-2 ГКАТ – по противоракетам.
НИИ-37 ГКРЭ – по системе радиолокационного обнаружения баллистических ракет и целеуказания средствам системы наведения.
ИТМ и ВТ АН СССР – по аппаратуре центральной вычислительной станции.
НИИ-20 ГКРЭ – по радиолокационной станции визирования противоракет.
НИИ-129 ГКРЭ – по системе радиорелейных линий для передачи данных автоматического взаимодействия объектов системы.
ГСКБ-47 ГКОТ – по осколочно-фугасным боевым частям противоракет.
НИИ-1011 МСМ – по специальным боевым частям противоракет.
ЦКБ-34 ГКОТ – по пусковым установкам противоракет (совместно с ЦНИИ-173 ГКОТ – в части следящих приводов и ОКБ-476 МГСНХ – в части средств предстартовой автоматики и контроля).
НИИ-4 МО – по внешнетраекторным измерениям баллистических ракет, службе единого времени и связи полигона.
ЛИИ ГКАТ – по внешнетраекторным измерениям противоракет и измерениям промаха.
ГНИИП-10 МО – по обеспечению и проведению совместно с разработчиками всех испытаний средств комплекса.
ЦИПСС МО – по проектированию полигонных сооружений.
32 УИР ГУАСС МО – по строительству технологических и жилищно-бытовых сооружений полигона.
Система «А» была разработана в соответствии с Постановлениями:
– ЦК КПСС и Совета Министров СССР за № 170-101 от 3 февраля 1956 г.;
– Совета Министров СССР за № 1160-596 от 18 августа 1956 г.
Экспериментальный комплекс средств противоракетной обороны размещался на полигоне системы «А» (так он назывался в конце 1950-х гг.) близ железнодорожной станции Сары-Шаган (Казахстан, озеро Балхаш).
При комплексной отработке средств системы «А» запуск баллистических ракет типа Р-12 осуществлялся в точку Т-12 со специально построенной для этой цели стартовой позиции ВСП-12, а запуск ракет типа Р-5 – со стартовой позиции СП-5 в точку Т-5, находящуюся в 5 км западнее точки Т-12.
Основными технологическими объектами системы «А» являлись:
– станция обнаружения баллистических ракет «Дунай-2», состоящая из передающей и приемной частей (объект № 14);
– центральная вычислительная станция (объект № 40);
– три радиолокатора точного наведения (объекты № 1, 2, 3);
– стартовая позиция в составе радиолокационной станции визирования противоракет, совмещенной со станцией передачи команд (станция вывода) и двух стартовых площадок, оборудованных пусковыми установками СМ-71 для запуска противоракет В-1000 (объект № 6);
– техническая позиция для сборки, контроля и снаряжения противоракет В-1000 (объект № 7);
– радиорелейные станции системы передачи данных: центральная (на объекте № 40), оконечные (на объектах №№ 1, 2, 3 и 14) и промежуточные – всего шестнадцать станций;
– комплекс регистрации и обработки данных полигонных измерений.
Полигон был оборудован измерительными пунктами системы внешнетраекторных измерений (объекты №№ 16, 17, 18, 19, 20, 21, 22) и службой единого времени.
С системой «А» были тематически связаны также работы по изучению радиолокационных свойств баллистических ракет:
– средних дальностей – с помощью специализированной экспериментальной установки РЭ-2, размещенной на объекте № 2 полигона «А»;
– межконтинентальных – с помощью специализированной экспериментальной установки РЭ-2М, созданной в районе падения ракет типа Р-7 (объект «Ока») в соответствии с Постановлением ЦК КПСС и Совета Министров за № 1164-525 от 26 сентября 1957 г.
При комплексных испытаниях системой «А» 4 марта 1961 г. была уничтожена головная часть баллистической ракеты Р-12 в инертном снаряжении (с грузовым макетом вместо спецзаряда), а 26 марта 1961 г. взорвана на траектории головная часть ракеты Р-5 со штатным фугасным боезарядом.
Взаимодействие элементов системы «А». При появлении цели в рабочей зоне радиолокационная станция обнаружения БР осуществляла захват цели на автоматическое сопровождение, определяла ее текущие координаты и выдавала их на центральную вычислительную станцию системы. Центральная вычислительная станция по результатам статистической обработки текущих координат цели вырабатывала целеуказания для трех радиолокаторов точного наведения, а также определяла упрежденные координаты цели.
По данным внешних целеуказаний все три радиолокатора точного наведения осуществляли захват цели на автоматическое сопровождение и выдавали уточненные данные о ее координатах на центральную вычислительную станцию системы. По уточненным координатам цели центральная вычислительная станция проверяла попадание пролонгированной точки падения цели в зону обороны стартовой позиции, определяла параметры кинетической траектории вывода противоракеты на траекторию цели, вырабатывала данные для предстартовых разворотов пусковых установок, платформ свободных гироскопов и антенных устройств станции вывода противоракеты, определяла момент пуска и выдавала команду пуска противоракеты.
После старта противоракета захватывалась на автоматическое сопровождение радиолокационной станцией визирования противоракеты, которая определяла и выдавала на центральную вычислительную станцию текущие координаты противоракеты.
Эти координаты использовались для формирования команд управления противоракетой на этапе вывода и для выработки целеуказаний по противоракете радиолокаторам точного наведения.
После вывода противоракеты на траекторию, близкую к пролонгированной траектории цели, начинался этап точного наведения противоракеты на цель. Этот этап характеризовался тем, что команды управления противоракетой формировались центральной вычислительной станцией по данным о дальностях цели и противоракеты, измеряемой тремя радиолокаторами точного наведения.
В расчетный момент времени центральная вычислительная станция выдавала команду подрыва боевой части противоракеты.
Команды управления противоракетой и команда подрыва передавались на противоракету станцией передачи команд.
Обмен информацией между объектами осуществлялся с помощью радиорелейных линий системы передачи данных в форме цифровых кодов двоичной системы счисления.
Разработчики системы «А»

Борис Петрович ВИНОГРАДОВ – заместитель генерального конструктора НИИРП, кандидат технических наук, старший научный сотрудник, профессор МАИ
Фото: Михаил ХОДАРЕНОК

Владимир Николаевич ВИНОГРАДОВ – доктор технических наук, доцент, заместитель начальник НТЦ НИИРП по научной работ
Фото: Михаил ХОДАРЕНОК

Виктор Алексеевич КАПЫРИН – кандидат технических наук, старший научный сотрудник, начальник отдела НИИРП
Фото: Михаил ХОДАРЕНОК
Станция обнаружения баллистических ракет «Дунай-2» (главный конструктор – В. П. Сосульников). Станция «Дунай-2» предназначалсь для обнаружения баллистических ракет, построения их траекторий и выдачи данных целеуказания радиолокаторам точного наведения.
«Дунай-2» представляла собой радиолокационную станцию непрерывного излучения радиоволн метрового диапазона, которая определяла дальность и две угловые координаты цели.

Антенная система радиолокационной станции визирования противоракет
Фотоархив ВКО
В состав станции входили антенные системы, передающее устройство, приемо-индикаторное устройство и устройство автоматического сопровождения цели и выдачи ее координат.
Передающая и приемная позиция станции со своими антенными системами были разнесены на местности на расстояние одного километра.

Один из трех радиолокаторов точного наведения
Фотоархив ВКО
Передающая антенная система была выполнена в виде параболического цилиндра, облучаемого с помощью двух щелевых волноводных облучателей. Габаритные размеры передающей антенной системы – 8 м на 150 м. Передающая антенная формировала в пространстве две диаграммы направленности размером 0,6 град на 16 град.
Приемная антенная система состояла из двух ярусов антенн, аналогичных передающей антенной системе и двух пар волноводных щелевых облучателей. Общие габаритные размеры приемной антенной системы – 20 на 150 м. Приемная антенная система формировала в пространстве веерообразную диаграмму направленности, состоящую из лепестков с размерами 0,6 град на 12 град.

Промежуточная радиорелейная станция системы передачи данных
Фотоархив ВКО
Передающее устройство состояло из двух передатчиков, каждый из которых излучал мощность 40 кВт.
Центральная вычислительная станция (главный конструктор – С. А. Лебедев). Центральная вычислительная станция обеспечивала автоматическое взаимодействие всех технологических объектов системы «А». Она решала следующие задачи:
– расчет упрежденной траектории цели по данным системы обнаружения;
– выработка данных целеуказания для антенных устройств и дальномерных следящих систем каналов цели трех радиолокаторов точного наведения;
– уточнение траектории цели по данным радиолокаторов точного наведения;
– проверка попадания упрежденной точки падения цели по району обороны стартовой позиции;
– определение параметров кинематической траектории вывода противоракеты на траекторию полета цели;
– определение данных для предстартового разворота пусковых установок и платформ гироскопов стабилизации противоракет по крену;
– определение предстартовых угловых разворотов антенных устройств станции визирования противоракет и станции передачи команд;
– определение момента пуска противоракеты и выдачи на стартовую позицию команды «Пуск»;
– выработка команд управления противоракетой на этапе вывода и точного наведения;
– определение момента перехода с этапа вывода противоракеты на этап точного наведения;
– определение момента подрыва и выдачи команд на подрыв боевой части противоракеты.

Центральная вычислительная станция
Фотоархив ВКО
Центральная вычислительная станция состояла из центральной вычислительной машины, специализированной счетной машины, распределительно-преобразующего устройства, счетчика времени (электронных часов) и центрального пульта управления.
Центральная вычислительная машина представляла собой трехадресную быстродействующую цифровую машину параллельного типа со следующими основными параметрами:
– числа машины представлялись 37 двоичными разрядами с фиксированной запятой;

Центральная радиорелейная станция системы передачи данных
Фотоархив ВКО
– среднее быстродействие – 40 тыс. операций в сек;
– скорость выполнения элементарного сложения – 300 тыс. сложений в сек;
– скорость выполнения умножения – 50 тыс. умножений в сек;
– объем оперативной памяти – 4096 чисел;
– объем внешней памяти, служащей для хранения боевых программ и фиксации данных экспресс-информации – 30 тыс. чисел.
Специализированная счетная машина являлась быстродействующей вычислительной машиной с жестко закоммутированной программой и предназначалась для согласования темпов работы центральной вычислительной станции и всех других технологических объектов системы, а также для первичного усреднения и экстраполяции данных.
Распределительно-преобразующее устройство предназначалось для преобразования информации, поступающей с радиорелейных линий, в вид, удобный для ее ввода в специализированную счетную машину, а также для преобразования информации специализированной счетной машины в вид, удобный для ее выдачи на радиорелейные линии передачи данных.

Электронно-вычислительная машина М-50
Фотоархив ВКО
Счетчик времени служит для ввода данных текущего времени в вычислительную машину, что обеспечивало боевую работу системы «А» в масштабе реального времени.
Центральный пульт управления предназначался для управления программами боевой работы и функционального контроля средств системы «А», а также программами автономного контроля.
Радиолокатор точного наведения (главный конструктор – Г. В. Кисунько). Радиолокатор точного наведения обнаруживал и сопровождал цель по данным внешнего целеуказания, вырабатываемым центральной вычислительной станцией. По данным радиолокаторов точного наведения уточнялась траектория цели и производились предстартовые расчеты. Радиолокаторы точного наведения получали также целеуказания по противоракете и сопровождали ее по дальности. На этапе точного наведения по трем дальностям до цели и трем дальностям до противоракеты, измеряемым радиолокатором точного наведения, вырабатывались команды управления противоракетой, а в конце наведения – команда на подрыв боевой части.
Ошибка определения разности дальностей до цели и противоракеты на этапе точного наведения противоракеты на цель не превышала 10 м. В станции имелась схема автоматической союстировки нулевых дальностей до цели и противоракеты по контрольному сигналу.
Антенный параболоид канала цели имел диаметр около 15 м, что обеспечивало остронаправленный луч шириной 0,7 град на 0,7 град.
Через эту антенну производилось облучение цели высокочастотными импульсами и принимались импульсы, отраженные от цели. Вес подвижной части антенного устройства составлял 92 тыс. кг. Приводные устройства имели мощность 70 и 40 кВт.

Центральный индикатор системы
Фотоархив ВКО
Антенна канала противоракеты излучала импульсы запроса и принимала ответные импульсы бортового приемоответчика противоракеты. Диаметр антенны – 4,65 м. Вес подвижной части – 8 тыс. кг. Приводные устройства имели мощность 2 кВт по каждой плоскости.
Передающее устройство канала цели генерировало высокочастотные импульсы визирования цели в дециметровом диапазоне. Мощность в импульсе – 30 МГВт. Длительность импульса – 3 или 0,5 мксек. Частота следования импульсов 200 и 400 Гц соответственно.
Передающее устройство канала противоракеты генерировало высокочастотные импульсы запроса противоракеты в дециметровом диапазоне. Мощность в импульсе – 1 МГВт, длительность импульса – 0,5 мксек, частота следования – 400 Гц.
Приемные устройства имели автоматические регулировки, обеспечивающие постоянство коэффициента усиления при определении угловых координат цели и постоянство принимаемых импульсов при определении дальностей.
Дальномерные устройства обеспечивали непрерывное автоматическое определение дальности до цели и противоракеты. Дальности определялись импульсным методом с применением цифровых следящих систем.
В дальномерах нашла применение специальная схема автоматического захвата головной части при отделении ее от корпуса за счет аэродинамического торможения его в плотных слоях атмосферы.
Угловые следящие системы управляли положением антенн, устанавливая их в соответствии с данными внешнего целеуказания, обеспечивали автоматическое слежение за целью моноимпульсным методом и определение ее угловых координат.
Аппаратура функционального контроля позволяла производить автоматическую проверку готовности радиолокатора точного наведения к боевой работе.
Индикаторные устройства позволяли операторам контролировать работу аппаратуры при боевых действиях и в режиме функциональных проверок.
Аппаратура системы передачи команд
Фотоархив ВКО
Все управление боевой работой радиолокатора точного наведения было автоматизировано и осуществлялось дистанционно по радиорелейным линиям от центральной вычислительной станции при минимальном участии операторов.
Команды дистанционного управления и автоматического взаимодействия поступали на аппаратуру радиолокатора с пульта центрального индикатора системы и центральной вычислительной станции по радиорелейным линиям системы передачи данных.
Координаты цели и противоракеты выдавались с радиолокатора точного наведения на центральную вычислительную станцию в цифровой форме, что обеспечивало возможность передачи информации без ухудшения ее качества и точности. Электронная аппаратура была выполнена на широкой основе техники дискретного счета, полупроводниковых элементов и печатного монтажа. По меркам второй половины 1950-х гг. это были весьма и весьма передовые технические решения и технологии.
Время боевой готовности станции из дежурного режима – 15 сек. Мощность электроэнергии, потребляемой радиолокатором точного наведения в боевом режиме, составляла 650 кВт.
Радиолокационная станция визирования противоракеты (главный конструктор – С. П. Рабинович). Радиолокационная станция визирования противоракеты предназначалась для автоматического захвата противоракеты и сопровождения ее с момента сброса ускорителя до момента подрыва боевой части.
Станция визирования автоматически сопровождала противоракету по сигналам бортового приемоответчика и выдавала на центральную вычислительную станцию текущие координаты противоракеты (две угловых координаты и дальность).
Станция визирования представляла собой импульсную радиолокационную станцию, работающую в дециметровом диапазоне волн. Станция обеспечивала захват противоракеты в конусе разброса стартовых траекторий противоракеты, равном плюс-минус 7 град. Диапазон измерения дальности до противоракеты – 1-60 км. Максимальная ошибка измерения дальности – 30-50 м. Максимальная ошибка измерения угловых координат – 10 мин.
В состав радиолокационной станции визирования противоракеты входили два (для резервирования) одинаковых радиолокатора, центральный пульт управления и автоматическая контрольная станция.
Каждый радиолокатор включал в себя антенно-фидерную систему, передающее и приемное устройства, систему измерения дальности, систему управления антенной колонкой, систему дискретного преобразования координат и пульт управления.
Антенная система была выполнена в виде трех параболических зеркал, смонтированных на общем поворотном механизме и включала в себя антенну канала захвата, антенну точного сопровождения и антенну компенсации, совмещенную с антенной станции передачи команд. Диаметры параболических зеркал антенн соответственно были равны – 1 м, 2,5 м и 2,5 м.
Магнетронный передатчик генерировал высокочастотные импульсы с частотой повторения 880 Гц, мощностью 1 МГВт, длительностью 1 мксек.
Приемное устройство состояло из трех каналов – захвата, сопровождения и компенсации флюктуаций ответного сигнала.
Управление станцией было полностью автоматизировано и осуществлялось дистанционно по командам и сигналам, поступающим от центральной вычислительной станции по радиорелейным линиям. Время готовности аппаратуры к боевой работе из дежурного режима – 15 сек. Аппаратура выполнялась в стационарном варианте и монтировалась в поземном бункере.

Огневая позиция системы «А»
Фотоархив ВКО
Станция передачи команд (главный конструктор – Г. В. Кисунько). Станция передачи команд предназначалась для преобразования, формирования и передачи команд управления противоракеты и главной команды для подрыва боевой части. На вход станции передачи команд с центральной вычислительной станции, через систему передачи данных, поступала информация команд управления с частотой 400 Гц в виде последовательного цифрового кода двоичной системы счисления.
С выхода станции передачи команд команды управления передавались поочередно с частотой 40 Гц в виде радиосигналов непрерывного излучения с амплитудной модуляцией дискретными частотами шифрации.
Огибающая радиосигналов представляла собой последовательность частотно-модулированных посылок, составляющих кодовые группы команд, каждая из которых отражала в двоичной системе счисления величину и знак команды управления на рули противоракеты. Главная команда передавалась двумя посылками – различными частотами модуляции.
Станция передачи работала в дециметровом диапазоне волн с выходной мощностью в телефонном режиме не менее 180 КВт. Антенное устройство конструктивно совмещалось с антенной станции визирования и формировало диаграмму направленности шириной 14 град. по уровню половинной мощности.
Управление станцией осуществлялось автоматически по командам от центральной вычислительной станции. Готовность аппаратуры, находящейся в дежурном режиме, не более 15 сек. Аппаратура выполнялась в стационарном варианте и монтировалась в подземном бункере.
Огневая позиция. Огневая позиция состояла из двух стартовых площадок, оборудованных стационарными пусковыми установками СМ-71П, и пункта управления с аппаратурой автоматического контроля и пуска противоракеты В-1000.
На огневой позиции готовились к пуску одновременно две противоракеты, одна из которых – основная, вторая резервная, пуск которой происходил автоматически в случае отказа первой. Подготовка противоракет и пуск одной из них осуществлялся без участия операторов по командам, поступающим с центральной вычислительной станции на аппаратуру стартовой автоматики.
Аппаратура управления электросиловыми приводами, аппаратура стартовой автоматики и аппаратура обратного контроля углов предстартового разворота пусковых установок выполнялась в стационарном варианте и монтировалась в подземных сооружениях.
На переднем плане фото «Огневая позиция» видны две пусковые установки с бункером управления между ними, на заднем плане – бункер станции вывода и оконечная радиорелейная станция.
Пусковая установка СМ-71П. Пусковая установка СМ-71П состояла из основания и подвижной части, которая обеспечивала разворот противоракеты в горизонтальной плоскости на угол плюс-минус 185 град. и в вертикальной плоскости на угол – 10-70 град.
Для разворотов подвижной части пусковой установки использовались электросиловые приводы с мощностями: по азимуту – 50 КВт, по углу возвышения – 20 КВт. Вводными сигналами для работы электросиловых приводов пусковой установки являлись импульсы цифрового кода, поступающие с центральной вычислительной станции. Преобразование кодовых импульсов в управляющие напряжения осуществлялось распределительно-преобразующим устройством и станцией управления приводами.
Пусковые установки были смонтированы на специальном фундаменте и окружены защитной газоотбойной стенкой. Вес пусковой установки – 39 тонн.
Противоракета В-1000 (главный конструктор – П. Д. Грушин). Противоракета В-1000 представляла собой двухступенчатую управляемую ракету с высокой средней скоростью полета (1100 м/сек), предназначенную для поражения головных частей баллистических ракет.
Противоракета состояла из маршевой части с жидкостным ракетным двигателем и порохового ускорителя, обеспечивающего ее быстрый разгон до сверхзвуковых скоростей. Стабилизация полета на участке разгона осуществлялась тремя стабилизаторами, установленными на пороховом ускорителе.
На второй ступени располагались крылья малого удлинения и аэродинамические рули. Крылья и рули были установлены «x»-образно в двух взаимно перпендикулярных областях, образующих два независимых канала управления. Стабилизация второй ступени по крену обеспечивался автопилотом, отклоняющим одну пару рулей как элероны.
Управление противоракетой осуществлялось после сброса ускорителя радиокомандами с земли.
На борту противоракеты радиокоманды принимался бортовым приемным устройством и передались на автопилот, который с помощью пневматических рулевых машин осуществлял отклонение рулей, соответствующих переданным командам. Отклонение рулей вызывали маневр противоракеты, обеспечивающий наведение ее на цель.
Команда на подрыв боевой части передавалась с земли по радиолинии управления на предохранительно-исполнительный механизм, инициирующий боевую часть.
Боевая часть противоракеты В-1000 (главный конструктор – К. И. Козорезов). Поражение головной части баллистической ракеты в системе «А» обеспечивалось осколочно-фугасной боевой частью, содержащей 16 тыс. активных поражающих элементов. Каждый поражающий элемент представлял собой шарик взрывчатого вещества, несущий в себе карбид-вольфрамовое ядро и заключенный в тонкую металлическую оболочку.
При подрыве боевой части поражающие элементы выбрасывались перпендикулярно оси противоракеты, образуя круговое поражающее поле, распространяющееся по радиальным направлениям со скоростью 170 м/сек. Сближение ракеты с головной частью баллистической ракеты осуществлялось на встречных курсах. Осколочно-фугасные элементы, сталкиваясь с целью со скоростями не менее 4-6 км/сек, вызывали разрушение ее силовой оболочки. Это приводило к подрыву боевой части баллистической ракеты, либо создавало условия для последующего ее уничтожения под воздействием термоаэродинамических факторов при дальнейшем движении в плотных слоях атмосферы.
Техническая позиция. Техническая позиция предназначалась для сборки противоракет В-1000, проведения автономных и комплексных проверок бортовой аппаратуры, а также для снаряжения противоракеты порохом, топливом, воздухом и боевой частью.
Вторая ступень противоракеты в разобранном виде поступала в монтажно-испытательный корпус, где производилась ее расконсервация и сборка. После сборки второй ступени проводились автономные проверки аппаратуры радиоуправления, визирования, автопилота, взрывательного устройства, телеметрии и электрооборудования борта противоракеты, а также комплексная проверка аппаратуры.
Одновременно на пиротехнической позиции производилось снаряжение ускорителя ПРД-33 пороховым зарядом, воспламенительным устройством и пиротехническим запалом.
Снаряженный ускоритель ПРД-33 стыковался со второй ступенью противоракеты на транспортно-стыковочном полуприцепе в монтажно-испытательном корпусе.
Полностью состыкованная противоракета В-1000 поступала на заправочную станцию для заправки ее воздухом, горючим и окислителем, после чего она транспортировалась на пиротехническую позицию, где производилась установка боевой части. Затем полностью готовая управляемая ракета доставлялась на стартовую позицию.
Центральный индикатор системы. Центральный индикатор системы «А» предназначался для: визуального наблюдения отметок цели и противоракеты и приближенной оценки их координат; выдачи команд управления режимами работы средств системы; получение информации о режимах работы средств системы в процессе боевой работы и функционального контроля системы в целом.
В состав аппаратуры центрального индикатора системы «А» входили: индикатор целеуказания; индикатор наведения; индикатор высоты; пульт управления.
Индикатор целеуказания обеспечивал круговое изображение обстановки в радиусе действия 450 км в горизонтальной плоскости. На экране индикатора отображались в виде светящихся отметок цель, противоракета, точка их встречи, точки стояния трех радиолокаторов точного наведения и стартовой позиции.
Наличие послесвечения люминофора экрана трубки позволяло наблюдать проекции траекторий движения цели и противоракеты на горизонтальную плоскость.
Индикатор наведения, имеющий такое же изображение, как и на индикаторе целеуказания, но в большем масштабе, обеспечивал круговой обзор в радиусе 160 км.
На экране индикатора высоты изображались координаты цели и противоракеты в виде ярких точек в прямоугольной декартовой системе координат «высота-время». Максимальное значение высоты – 225 км, максимальное значение времени – 130 сек. Кроме того, на экране фиксировалось время, оставшееся до момента встречи противоракеты с целью.
Пульт управления являлся составной частью системы управления экспериментального комплекса средств наведения и предназначался для дистанционного управления режимами работы всего комплекса средств и контроля состояния этих средств.
Для комплекса средств системы «А» предусматривались следующие режимы работы:
– предбоевой режим – режим непрерывной готовности средств комплекса к боевой работе;
– боевой режим – режим работы, обеспечивающий автоматическое взаимодействие средств комплекса при решении задач в системе наведения;
– режим функционального контроля системы – режим периодической качественной проверки автоматического взаимодействия комплекса средств системы с целью оценки его боевой готовности.
Для раздельной проверки работы средств наведения системы «А» предусматривался режим периодического автономного функционального контроля, по результатам которого производилась оценка возможности включения соответствующих средств в общую систему управления экспериментального полигона «А».
Система управления обеспечивала централизованное и местное управление режимами работы средств. Централизованное управление осуществлялось с пульта центрального индикатора системы и с центральной вычислительной станции, а местное – с соответствующих пультов радиолокаторов точного наведения, стартовой позиции и центральной вычислительной станции после выдачи разрешения с пульта центрального индикатора системы.
Система управления и коммутации исключала возможность неправильных включений при ошибочных действиях операторов.
Система передачи данных (главный конструктор – Ф. П. Липсман). С помощью системы передачи данных осуществлялась передача команд и сигналов автоматического управления и взаимодействия между всеми основными технологическими средствами комплекса «А». Эта система обеспечивала также передачу сигналов единого времени, необходимых для работы средств полигона «А», служебную телефонную связь между объектами, а также синхронную работу всех измерительных элементов.
Система передачи данных представляла собой сеть автономных специальных дециметровых радиорелейных линий, берущих начало на центральной вычислительной станции. Радиорелейные линии имели следующую протяженность по направлениям от центральной вычислительной станции на основные объекты системы:
– на станцию «Дунай-2» – 10 км;
– на стартовую позицию – 146 км;
– на радиолокаторы точного наведения (№ 1 – 135 км; № 2 – 296 км; № 3 – 150 км).
Кроме того, между центральной вычислительной станцией и всеми объектами полигона имелись два направления радиорелейных линий командной связи и синхронизации измерительных объектов протяженностью 296 км и 198 км.
Общая протяженность радиорелейных линий составляла 1230 км.
Всего в системе было 16 оконечных и промежуточных станций.
На оконечных станциях устанавливалась импульсная аппаратура кодирования, декодирования и преобразования сигналов, дециметровые приемо-передающие устройства, антенно-фидерные сооружения, индикаторное оборудование, специальные устройства автономного и функционального контроля, а также устройства автоматики и электропитания.
На промежуточных пунктах устанавливалась главным образом дециметровое ретрансляционное оборудование.
Передача по радиорелейным линиям всей технологической информации велась импульсами двоичного цифрового кода длительностью порядка 0,3-0,6 мксек.
Благодаря примененному принципу временного разделения импульсных сигналов по каждому стволу радиорелейной линии передавалось шестнадцать независимых каналов информации, каждый из которых был рассчитан на передачу четырнадцатиразрядного двоичного кода. При этом по каждому стволу могло передаваться до 100 тыс. импульсов в секунду. В течение каждых восьми часов в системе передавалось до 30 млрд. импульсов.
В ходе испытаний была достигнута весьма высокая достоверность передачи и надежности системы. Достоверность передачи характеризовалась отношением десять в минус седьмой степени, что означало один сбой на десять млн. переданных импульсов.
Комплекс регистрации и обработки данных полигонных измерений. В процессе боевой работы на всех технологических объектах системы «А» производилась регистрация основных параметров системы, в том числе входных и выходных данных, внутренних параметров радиолокационных станций, а также параметров центральной вычислительной станции. Регистрация координат цели и противоракеты производилась также средствами системы внешнетраекторных измерений. Кроме того, осуществлялась фиксация с помощью телеметрической аппаратуры основных параметров системы управления на борту противоракеты.

Оконечная радиорелейная станция системы передачи данных, развернутая на позиции РТН
Фотоархив ВКО
Обработка цифровой информации производилась на универсальной быстродействующей электронно-вычислительной машине М-50. При этом информация, записанная на магнитной ленте, вводилась в машину М-50 автоматически.
В результате обработки материалов регистрации были получены данные по радиолокационным свойствам сигнала, отраженного от цели, характеру движения головной части и корпуса баллистической ракеты на атмосферном участке, а также данные о динамических характеристиках системы управления противоракетой.
Использование в комплексе обработки быстродействующих электронно- вычислительных машин позволило быстро получить все необходимые данные для оперативного анализа результатов пусков, а также для проведения последующих исследований.
В состав комплекса регистрации и обработки данных полигонных измерений входили:
– универсальная быстродействующая электронно-вычислительная машина М-50;
– контрольно-регистрирующая аппаратура для фиксации входных и выходных данных на магнитных лентах в процессе боевого цикла;
– специальное вводное устройство для ввода данных в машину М-50 с магнитных лент.
Универсальная быстродействующая электронно-вычислительная машина М-50 имела следующие основные характеристики:
– числа в машине М-50 представляли 40 двоичными разрядами с плавающей запятой;
– среднее быстродействие – 50 тыс. операций в сек;
– скорость выполнения умножения – 40 тыс. умножений в сек;
– объем оперативной памяти – 4096 чисел;
– скорость выполнения элементарного сложения – 300 тыс. сложений в сек;
– объем внешней памяти, служащей для хранения боевых программ и фиксации данных экспресс-информации – 45 тыс. чисел.
Машина М-50 работала с накопителем на магнитной ленте НМЛ-20. В качестве вводных устройств использовались перфокарты вычислительной машины М-50.
ЗАКЛЮЧЕНИЕ

Антенна канала цели радиолокатора точного наведения (во время монтажа)
Фотоархив ВКО
Система «А» по своим параметрам оказалась способна осуществлять перехват и поражение межконтинентальных баллистических ракет, запускаемых с дальностей до 8-10 тыс. км. Ввиду невозможности запуска МБР в район полигона «А» с имеющихся стартовых позиций возможность работы средств системы «А» по межконтинентальным ракетам проверялась путем организации радиолокационных наблюдений за МБР типа Р-7 с помощью специализированной экспериментальной установки РЭ-2М. Эта установка по своим параметрам была близка к радиолокаторам точного наведения системы «А».
Проведенные исследования показали, что радиолокаторы подобного класса могут надежно разрешать головную часть МБР от корпуса, устойчиво сопровождать ее с выдачей текущих координат, необходимых для наведения противоракеты на цель, и обеспечить требуемый баланс времени.
При этом подтвердилось также, что в выбранном для радиолокаторов точного наведения радиодиапазоне полностью отсутствует отражение от траекторного следа МБР, наличие которого могло бы создать помехи работе радиолокатора.
Испытания системы противоракетной обороны «А» подтвердили правильность и эффективность принципов, заложенных при проектировании первой боевой системы ПРО г. Москвы – А-35.
Опубликовано 26 января в выпуске № 1 от 2010 года
- Комментарии
- Vkontakte
- Читаемое
- Обсуждаемое
- Past:
- 3 дня
- Неделя
- Месяц
В чем вы видите основную проблему ВКО РФ?









